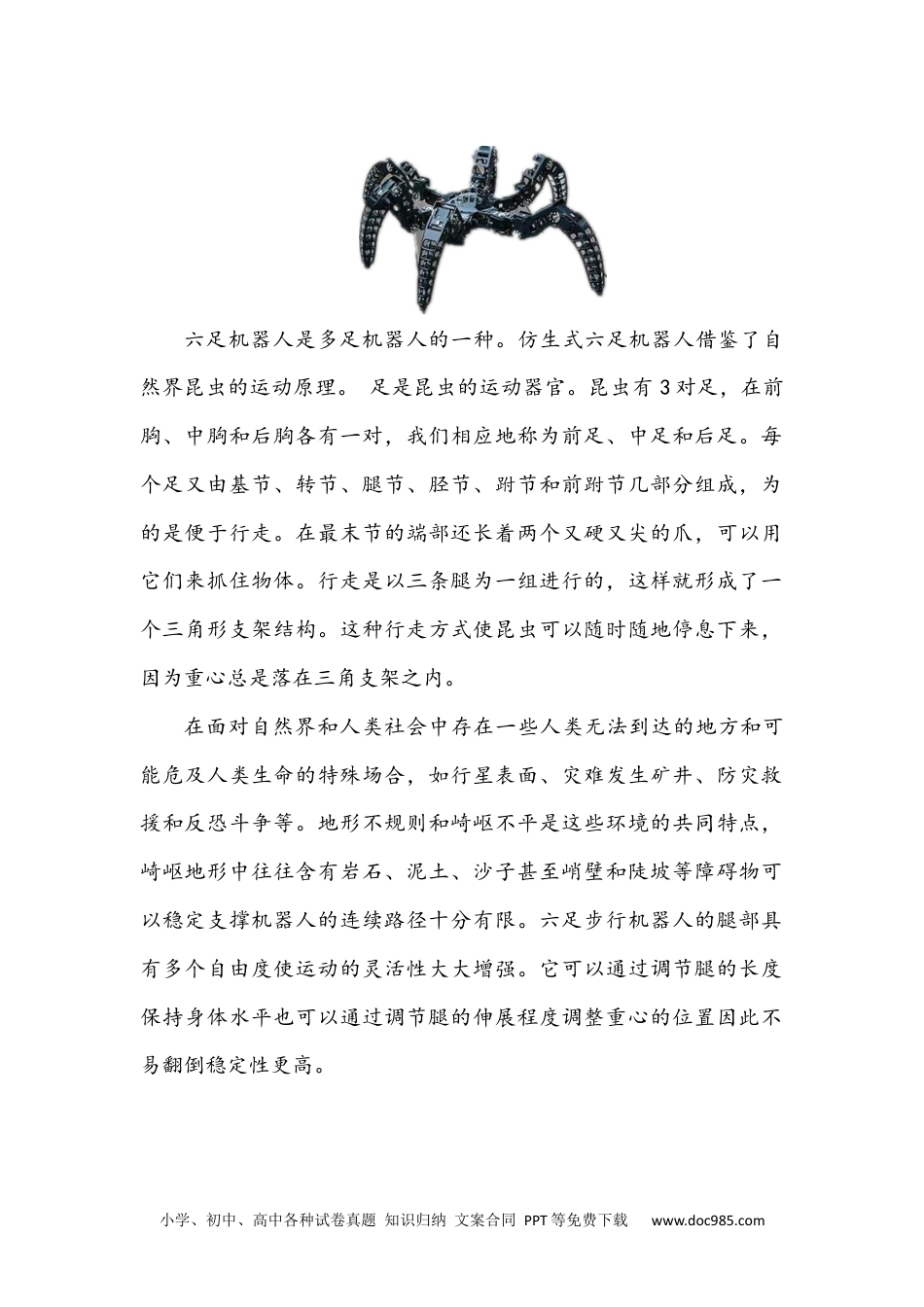
小学、初中、高中各种试卷真题知识归纳文案合同PPT等免费下载www.doc985.com六足机器人是多足机器人的一种。仿生式六足机器人借鉴了自然界昆虫的运动原理。足是昆虫的运动器官。昆虫有3对足,在前胸、中胸和后胸各有一对,我们相应地称为前足、中足和后足。每个足又由基节、转节、腿节、胫节、跗节和前跗节几部分组成,为的是便于行走。在最末节的端部还长着两个又硬又尖的爪,可以用它们来抓住物体。行走是以三条腿为一组进行的,这样就形成了一个三角形支架结构。这种行走方式使昆虫可以随时随地停息下来,因为重心总是落在三角支架之内。在面对自然界和人类社会中存在一些人类无法到达的地方和可能危及人类生命的特殊场合,如行星表面、灾难发生矿井、防灾救援和反恐斗争等。地形不规则和崎岖不平是这些环境的共同特点,崎岖地形中往往含有岩石、泥土、沙子甚至峭壁和陡坡等障碍物可以稳定支撑机器人的连续路径十分有限。六足步行机器人的腿部具有多个自由度使运动的灵活性大大增强。它可以通过调节腿的长度保持身体水平也可以通过调节腿的伸展程度调整重心的位置因此不易翻倒稳定性更高。小学、初中、高中各种试卷真题知识归纳文案合同PPT等免费下载www.doc985.com